Hodgson A, Kelly N, Peel D (2013) Unmanned Aerial Vehicles (UAVs) for Surveying Marine Fauna: A Dugong Case Study. PLoS ONE 8(11):
e79556. doi:10.1371/journal.pone.0079556
Introduction
The conservation and management of many marine mammal species is dependant on monitoring their population status by conducting aerial surveys.
The datasets produced from aerial surveys provide basic knowledge of the ecological requirements of species such as manatees (Trichechus manatus latirostris), North Atlantic right whales (Eubalaena glacialis), Humpback Whales (Megaptera novaeangliae), Harbour Porpoises (Phocoena phocoena), and Risso’s Dolphins (Grampus griseus).
In Australia, dugong (Dugong dugon) populations have been regularly surveyed over the last 20 to 30 years throughout large parts of their range. Aerial surveys are an effective survey method for this species because the method allows coverage of their extensive range. The overhead perspective of aerial surveys also maximizes the detection probability of dugongs considering they spend very little time at the water surface.
Mining in northern Australia has increased rapidly since 2000 resulting in numerous large-scale coastal developments (ports and processing facilities) proposed and approved throughout the dugongs’ range. Therefore, the Environmental Impact Assessments for most of these developments are required to include aerial surveys for dugongs. They are generally flown in a small aircraft at a set altitude and speed along transect-style flight paths designed to minimise biases in sampling.
UAVs operating under autopilot and mounted with GPS and imaging systems have the potential to replace traditional manned aerial surveys and provide an improved method for monitoring marine mammal populations.
The standard methods employed for surveys using manned aircraft have a number of limitations, which may be overcome by using UAVs, including reduced human risk, costs, missed sightings and/or misidentification of animals, low resolution of location data and the ability to survey isolated or otherwise inaccessible habitat areas.
The specific objectives of the trial were:
- Determine the effectiveness of a UAV with a customised imaging system for detecting and identifying dugongs.
- Test the capabilities of the UAV system for surveying dugongs in a range of environmental conditions.
- Determine the ideal resolution: area coverage ratio according to altitude (given our imaging system parameters).
Materials and Methods
The trial was conducted in Shark Bay, which is situated midway along the coast of Western Australia (25°30’S, 113°30’E). The bay is 13,000 km2 in area and divided into two embayments separated by the Peron Peninsula. Shark Bay is afforded a high level of protection as both a Marine Park and a World Heritage Area (WHA).
Insitu Pacific Pty Ltd, (Insitu’s Australia-based subsidiary) equipped their ScanEagle UAV with a stills camera payload for this trial, and were the operators of the system. The key capabilities of this particular UAV are the relatively large range and long endurance, both of which would allow this system to be used for surveys of the scale necessary for dugongs.
The imaging system payload for this trial contained a Nikon D90 12 megapixel digital SLR camera, together with a fixed video camera in the nose. Imagery from the latter camera was viewed in real-time from the Ground Control Station, providing improved situational awareness. A polarising filter was fitted to the lens for all flights, and the direction of the polarisation was kept constant. A yellow filter was tested during one flight to determine whether this would lessen the effect of sun glitter.
The research group programmed the UAV to fly a series of parallel line transects over seagrass banks known to be frequented by dugong herds on a daily basis. The small ‘survey’ consisted of 10 transects, each 1.8 km in length. It took approximately 1 min to complete each transect and an average of 23 min to complete all 10 transects.
For each survey the crew wanted to ensure that the number of images containing dugongs could be maximised. To achieve this goal, the exact location of the survey area, although always on the same seagrass bank, was determined immediately prior to each trial flight according to real time boat-based observations of the dugongs.
A dugong herd was located, the boat was positioned next to the herd, and the boat’s GPS position
radioed back to the Ground Control Station. The flight plan (i.e., the mapped locations of the 10 transects) was then altered so that the boat’s GPS position was in the centre of the survey area.
Sighting data recorded for each image included:
- Species, or where not possible, general taxa.
- Number of individuals of given species / taxa.
- Number of calves.
- Number classified (subjectively) as ‘certain’ and number of ‘uncertain’ individuals; uncertain sightings were either clearly fauna but of unclear taxa, or a ‘dugong shape’ that could not confidently be distinguished within the image.
- Number of double counts (i.e., the same individual animal occurring within the 10% overlap of successive images).
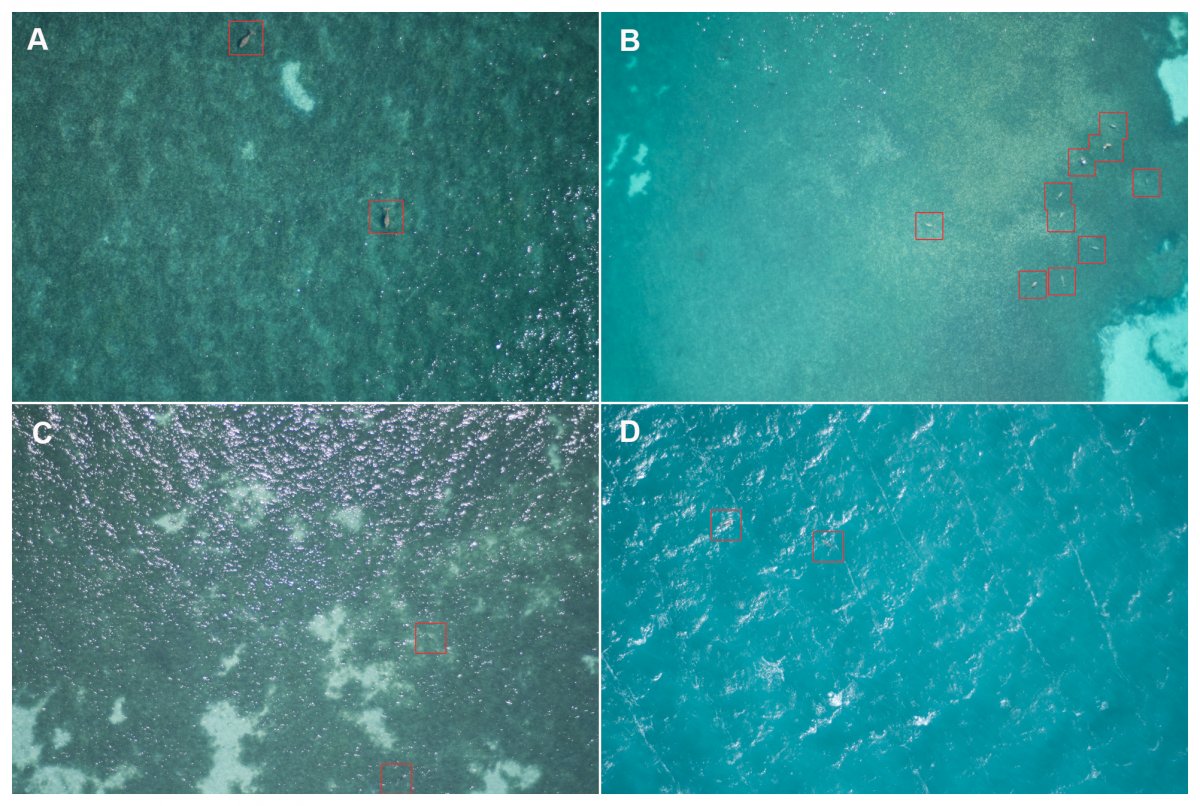
Three environmental variables were also scored for each image: sea state, turbidity and sun glitter. Sea state was scored for each image according to the Beaufort sea state scale. Turbidity (which incorporated a measure of depth) was subjectively scored for each image captured according to the following categories:
- Shallow with the bottom clearly visible
- Shallow with the bottom visible but obscured by turbidity
- Deep with the bottom not visible, but clear water
- Deep with the bottom not visible and turbid water
Results
The ScanEagle was tested in a range of wind conditions; according to data transmitted from the ScanEagle, the research crew noted at the beginning of each survey, the mean wind speed was 13 knots (range 6-26 knots).
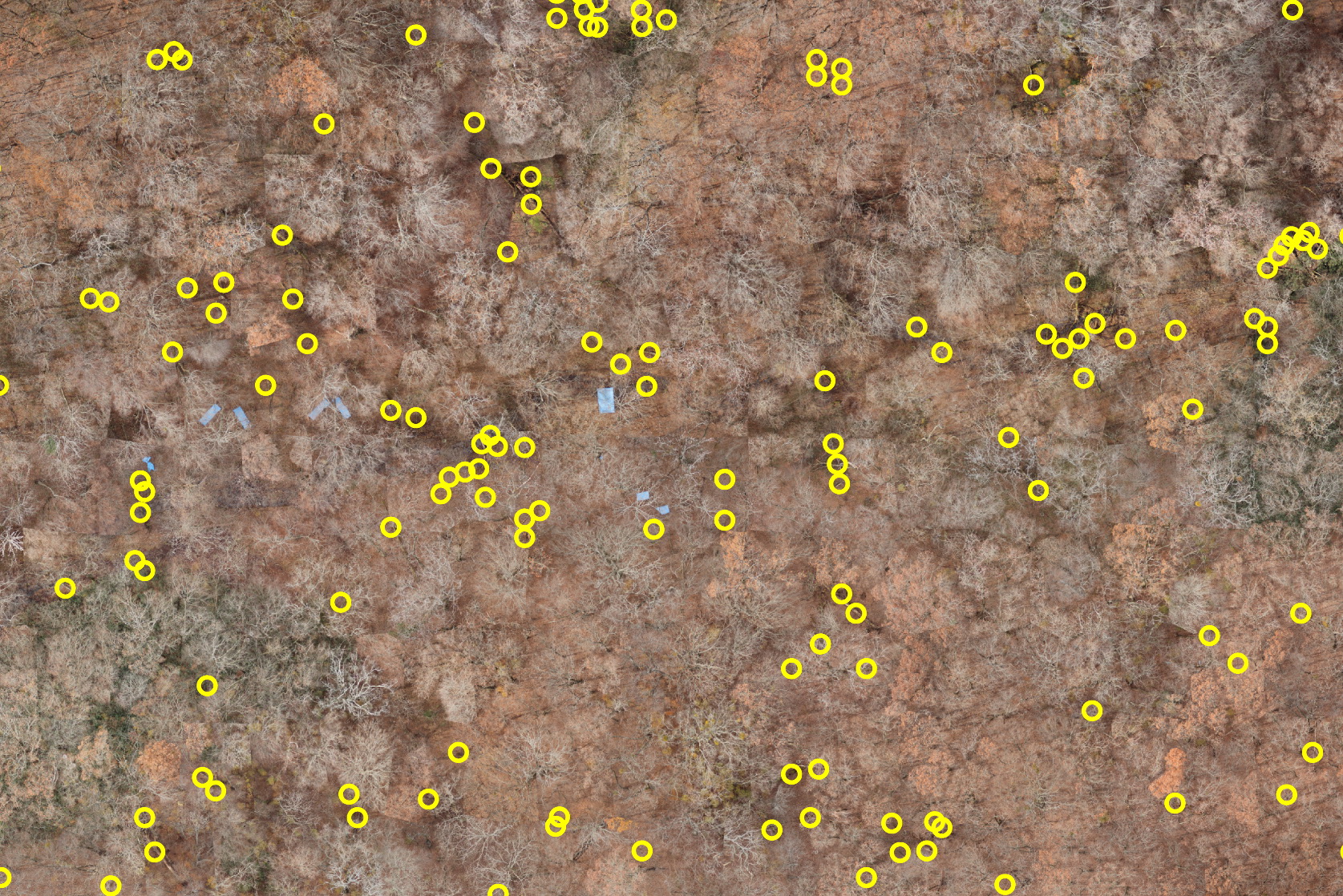
It was possible to identify a range of fauna within the images, including dugongs, dolphins, turtles, sharks, rays, seasnakes, fish schools and birds on the water surface. The research crew noted that dolphins and turtles could be identified to species level in many cases.
Of all images captured along predefined transect lines, across all surveys, a total of 626 images contained sightings of dugongs. The total count, after eliminating all double counts from overlap of images along the transect line, was 1036 dugong sightings. Dugongs could be identified with the same degree of certainty in images captured at survey altitudes of 500, 750 and 1000 ft.
Discussion
This initial trial of a basic payload system (digital SLR camera) successfully demonstrated that the ScanEagle UAV has great potential as a tool for marine mammal aerial surveys. Neither dugong sighting rate, nor the ability to identify dugongs with certainty, were affected by the altitude at which the survey was flown.
The ScanEagle was flown at three different altitudes: 500, 750 and 1000 ft. Therefore, considering the highest altitude provides the widest transect strip width, the appropriate altitude for a dugong survey (relative to the imaging system parameters) would be a minimum of 1000 ft.
When conducting flights at 1000 ft the transect strip width achieved (144 m) is narrower than is used during manned surveys, where usually, observers record sightings from 200 m strips on both sides on the aircraft (i.e., the total strip width is 400 m). This means that the ScanEagle would need to fly 2.8 times as many transects to achieve the same area coverage that a standard manned survey could achieve.
Although the results showed that turbidity influenced sighting rates, the direction of influence was not as expected—the estimate of the sighting rate for dugongs in deep murky waters was higher than those for either deep clear or shallow murky waters. Sea state is known to affect the ability of human observers to sight dugongs during aerial surveys. Dugongs are harder to detect during high sea state conditions presumably because (a) the observers’ eye is drawn to the appearance and movement of white-caps, (b) the white-caps create a masking effect, and (c) turbidity tends to increase. Of the three effects of sea state conditions outlined, the first (distraction caused by the movement of whitecaps) has the greatest impact on observers detecting dugongs in real time. Perhaps UAV systems could survey dugongs during higher wind speeds than traditional surveys. – this would be a significant advantage.
Sun glitter was visible in a high proportion of images, particularly during the early afternoon, but did not affect dugong sighting rates. The overlap between images, although only 10%, still appeared to provide enough information to interpret areas affected by glitter. The disadvantage of having large amounts of overlap between images is the large number of images captured and therefore the large amount of memory storage needed.
Sun glitter can be avoided by calculating the appropriate time of day to survey according to the angle of the sun (zenith angle), wind speeds (which determine wave tilt and therefore reflection of sun glint) and image sensor field of view.
Using a polarising filter can also reduce reflections of light off the water (both glare and glitter). The research grouup recognised that one needs to orient a polarising lens in an appropriate direction relative to the sun in order to filter the reflected light. The greatest benefit from the polarising filter occurs when both the sun elevation angle and the camera angle are at 37 degrees from the surface of the water. When conducting vertical photography, there is little to no effect of using a polarising filter, unless using a wide angle lens. Therefore, for future surveys, where the camera is pointed vertically, it would not be recommend to use a polarising filter.
In the introduction the author listed a number of limitations of manned surveys that was suggested UAV surveys may overcome. The first – eliminating human risk – is clearly achieved, because no observers were needed in light aircraft. The second – reducing costs – is difficult to quantify as the commercial company used for the research sets rates according to the specific requirements of each job and therefore it is not appropriate to quote exact costs. The advantage of having a permanent record of each sighting is that images can be re-checked to ensure sighting data are accurate.
Manual review of the images is time consuming, however, and the efficacy of UAV surveys will depend on the development of image analysis algorithms to automate the detection of animals (or possible sightings) within the images. There are currently no published algorithms that can detect marine fauna in aerial images, although a number of research groups are attempting to develop software for this purpose.
The next step in establishing the efficacy of replacing manned aerial surveys with UAVs is to determine whether the proportion of dugongs available to be sighted from the air at any one moment is equivalent for both methods. It is now important to determine whether the same proportion of dugongs can be seen in aerial images (i.e., are available) as can be seen by human observers in an aircraft. To this end, a direct comparison between the two techniques might be appropriate.
Acquiring the GPS location of every image provides greater accuracy in location data than for manned surveys where observers are calling sightings.
During this trial the research group were not able to test the ability of the ScanEagle UAV to survey in otherwise inaccessible habitat areas. Assuming permission to fly outside of visual line of sight, the theoretical operational limits of the UAV are (a) range, (b) endurance and (c) transport of the launcher, retrieval system and Ground Control Station. The range of the ScanEagle is up to 100 km (depending on topography), with the ability to leapfrog control to relay stations and extend the range. The endurance is up to 24 hours (depending on the weight of the payload) so surveys could conceivably be conducted throughout the day without landing, assuming there is sufficient memory on board for recording images.
Additional benefits of the UAV are the reductions in fuel consumption and potential noise disturbance.
Conclusion
This UAV trial showed that dugongs could be readily detected within images captured using the ScanEagle with a digital SLR imaging system. There are a number of potential advantages to using the UAV to conduct surveys rather than a manned aircraft. An unexpected outcome was that the dugong sighting rate using the imaging system was not affected by sea state, while high sea states are known to decrease sighting rates during manned surveys. Therefore UAV surveys could potentially be conducted in a wider range of wind conditions than manned surveys. The two key factors inhibiting the application of UAV surveys are (a) the field of view achieved within an image, which limits coverage within each transect, and (b) the time taken to analyse images manually in lieu of an image analysis algorithm that automates the detection of sightings.